本日から新たに広報担当となりました、学部4年のMです。
新年度の開始に合わせて、高玉研究室では衣替えが進んでいます…
研究室の掃除や学生PCの配備などを終え、われわれB4生もだんだんと研究室の雰囲気に慣れてきました。
プログラミング講習に教科書の輪読と、早々からとても充実した毎日です!
ARLISSの活動も本格始動!!
下の画像は、今年度の新しいアイデアの試作機です。
一体どんな動きをするのか・・・?

次回の更新でご紹介します!
お楽しみに♪
 |
| 高玉研究室の2機のローバー |

 |
| 赤とオレンジのタイヤ、ヒラメのように片側に寄ったレンズが特徴のローバー |
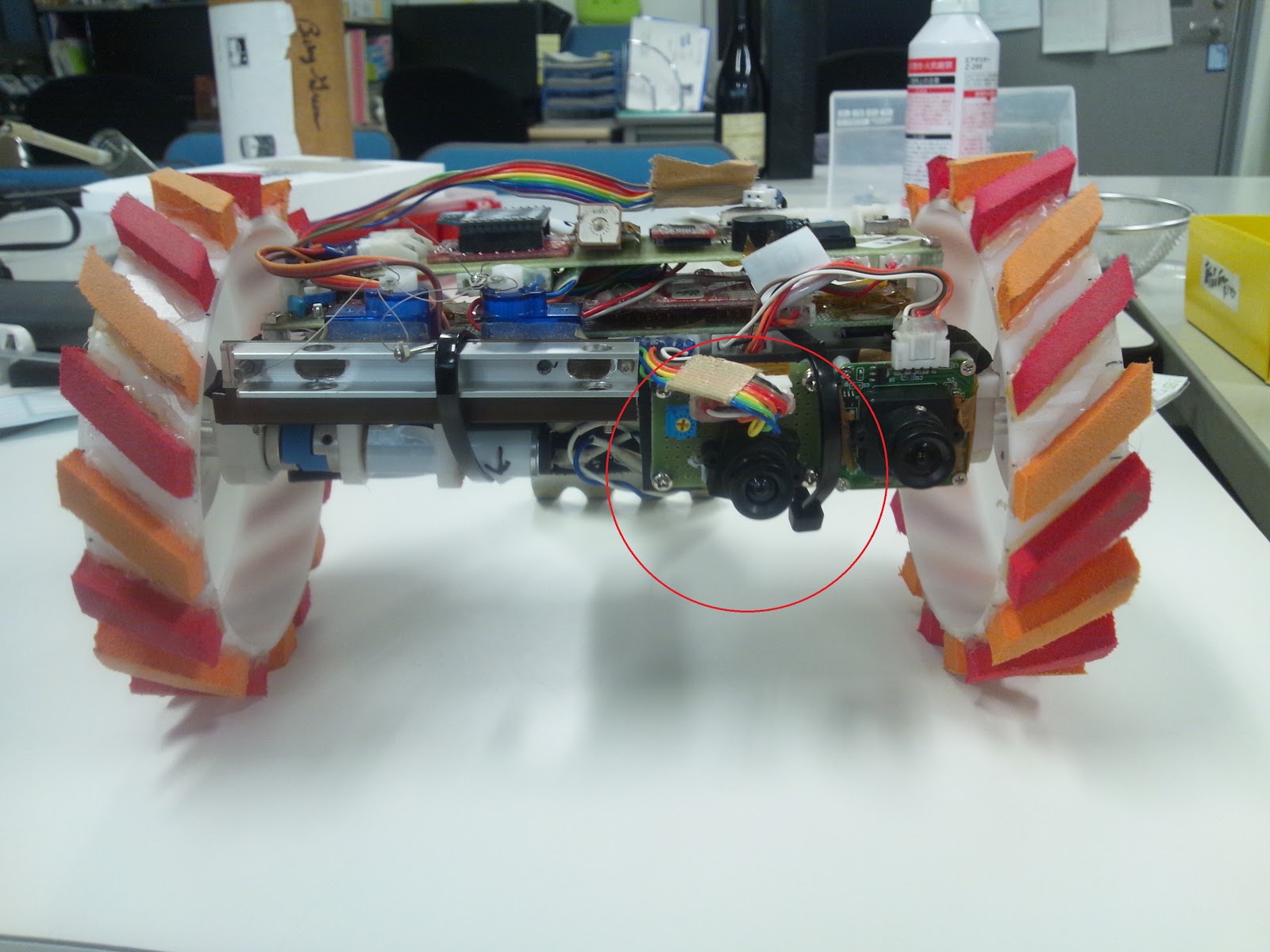 |
| ローバー正面から撮影。 赤く囲われているのがカラーセンサーモジュールです。 2つのレンズの内、中央側がカラーセンサーモジュール、タイヤ側がカメラモジュールになります。 |



